实现AGV/AMR的功能安全
AMR / AGV远程急停
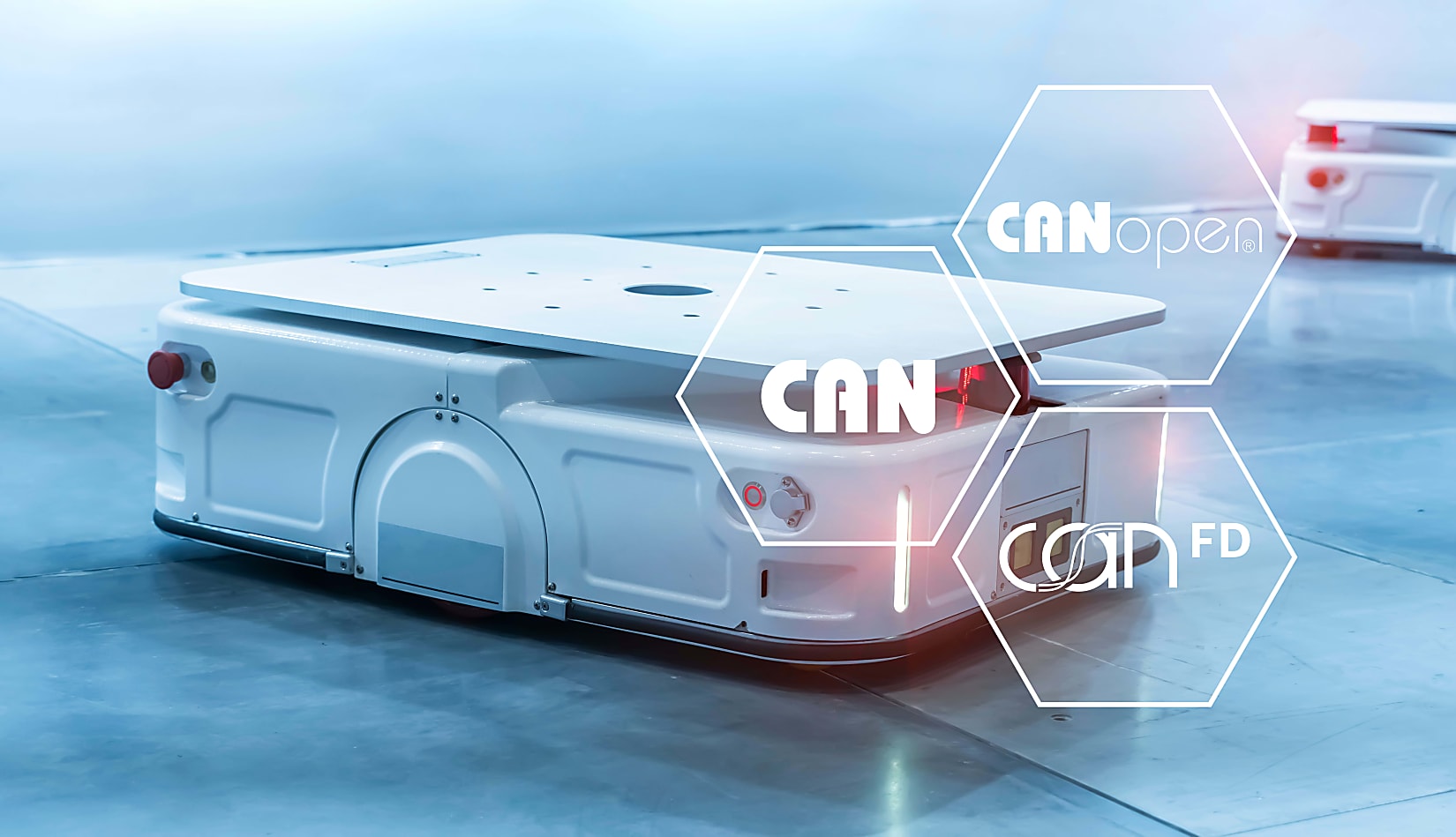
您的移动机器人需要在 PROFIsafe、CIP Safety 或 FSoE 等安全网络上进行通信,以实现安全的远程停止和操作。HMS Networks的Ixxat Safe解决方案可让您实现连接。
为您的 AGV/AMR 提供安全堆栈、安全 IO 模块和数十年的安全专业知识,以确保安全 PLC 功能的无缝实施。