CAN(控制器局域网)、CAN FD(具有灵活数据速率的CAN)和CAN XL是CAN总线系统的三个版本,经常用于汽车和工业自动化。
经典的CAN是在1980年代开发的,广泛用于汽车行业的网络控制单元(ECU)以及工业应用。还使用基于CAN的更高协议,例如CANopen,DeviceNet或SAE J1939。
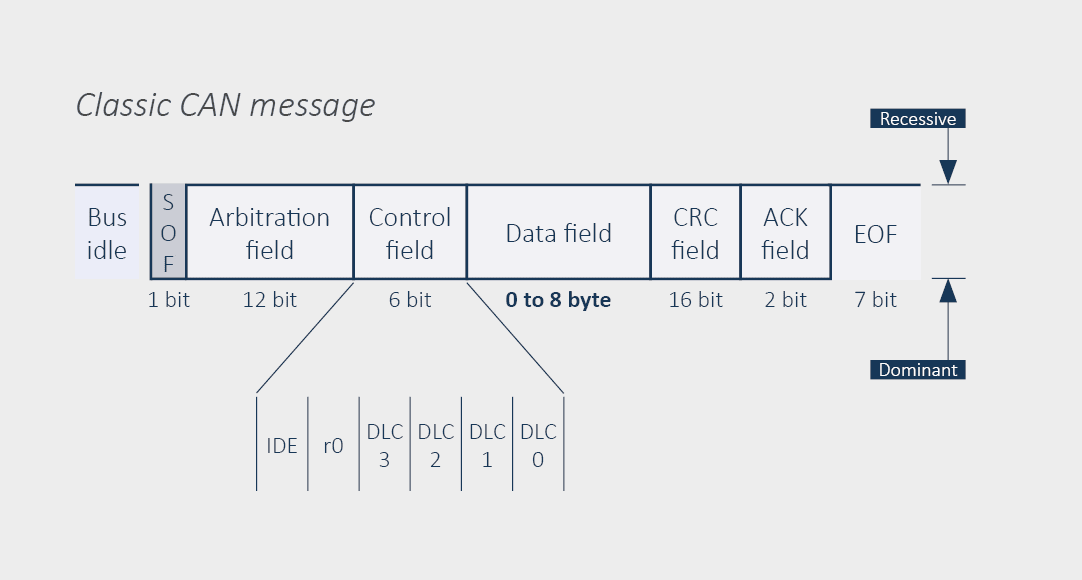
使用经典CAN时,支持高达1 Mbit/s的数据速率,每条消息最多可传输8个字节。
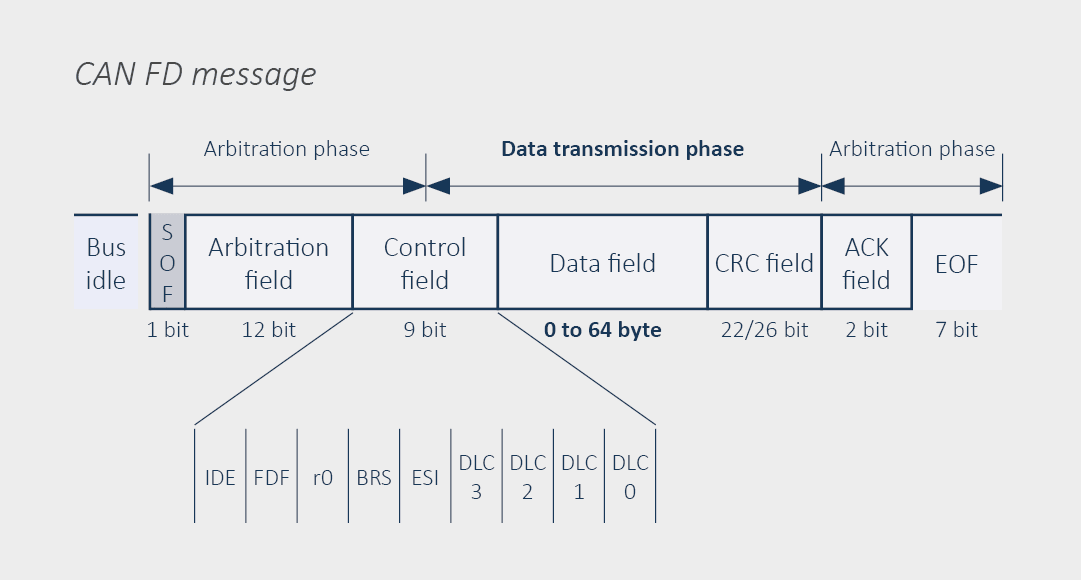
对能够传输大量数据的需求不断增长,尤其是在汽车行业。出于这个原因,博世在2012年推出了熟悉的经典CAN的扩展版本,其中可用数据速率和用户数据长度得到了显著扩展。另一方面,保留了经过验证的CAN概念:基于报文ID的仲裁,事件控制的报文发送以及使用确认位确认收到的报文。
与经典的CAN相比,CAN FD支持每条消息最多64字节的传输。在数据传输过程中,CAN FD可以切换到高达5 Mbit/s的更高比特率(在某些情况下甚至高达8 Mbit/s)。
目前,CAN FD的主要应用领域是汽车环境;它在工业应用中并不常见。
经典CAN节点和CAN FD节点之间的混合操作(没有额外的网关)是不可能的,因为经典CAN节点会通过发送错误帧来响应CAN FD报文。在通过错误状态(错误活动/错误被动/总线关闭)后,经典节点将在短时间内完全停止通信。
CAN XL 是控制器局域网(CAN)的新版本,在CAN FD推出后不久推出。这一发展也反映了汽车电子的快速发展。其中尤为重要的是汽车以太网和IP技术的影响,这些技术正在显著改变车辆的通信方式。
CAN XL的功能原理和基本结构与CAN FD一致。
但是,标识符现在仅用作仲裁的优先权 ID。引入了 32 位接受场 (AF),它是控制场的一部分,用于寻址。
虽然仲裁速率保持不变,为<1 Mbit/s,但数据速率有了巨大的飞跃, 高达20 Mbit/s。由于扩展的数据字段大小 高达2,048字节,以太网帧现在也可以首次在CAN报文中传输。
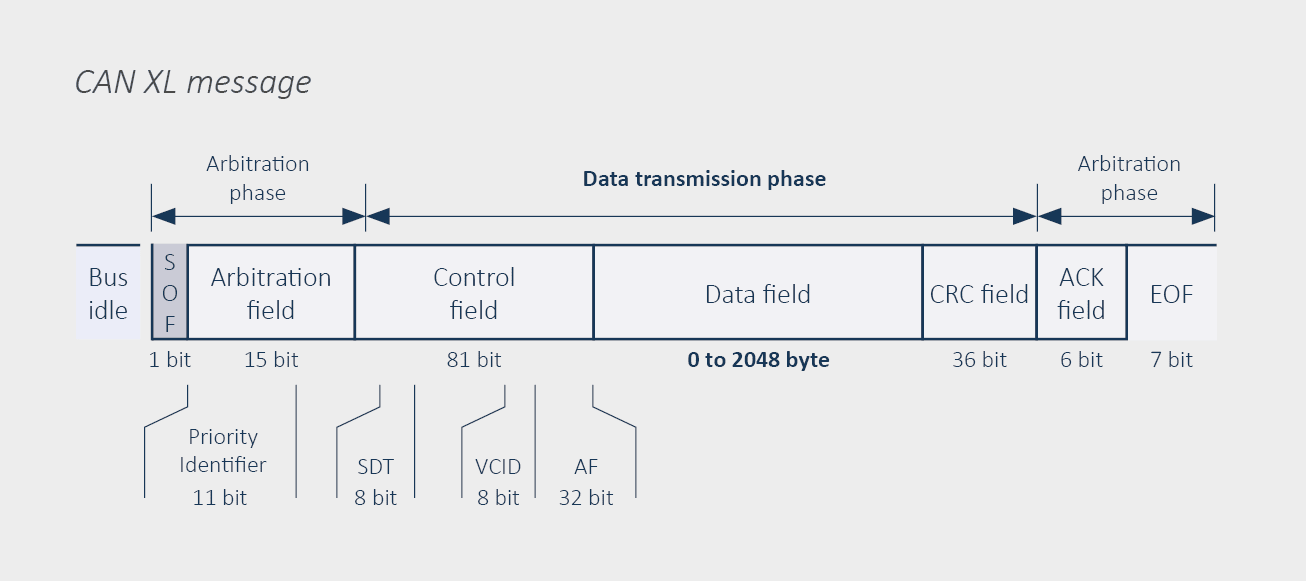
通过引入新的 SDT(服务数据单元类型)字段,现在还可以引用下一个更高级别的协议。这允许根据 SDT 字段以不同的方式解释用户数据。此外,新的VCID字段(虚拟CAN网络ID)可用于将物理CAN XL网络细分为多个逻辑网络。得益于8位字段,CAN XL可以运行多达256个不同的逻辑网络。
总之,虽然经典CAN是为基本网络要求而设计的,但CAN FD和CAN XL在数据速率和数据长度方面提供了扩展功能,以应对现代汽车和工业应用中对更高数据传输和更大数据包日益增长的需求。